
Roboauto project aims to develop robotic car prototype as a platform for testing new approaches of road recognition, car control etc.
Robot Quido was developed by a team of researchers from Roboauto project (see roboauto.cz), Brno University of Technology to advance the state-of-the-art in autonomous driving of car-like vehicles. The main contribution of this navigation architecture is behind the idea of putting together relatively simple approaches for solving particulal problems in autonomous navigation and increase the robustness of the whole system by high-level reasoning. Nowadays we have participation in several robotic competitions with excellent results which minor an intense five years development effort. For example: Robot sick day (2011), Robotour (2009, 2010, 2011, 2012), and RoRo (2010, 2011, 2013). The primary goal is create fully autonomous car for urban environment.
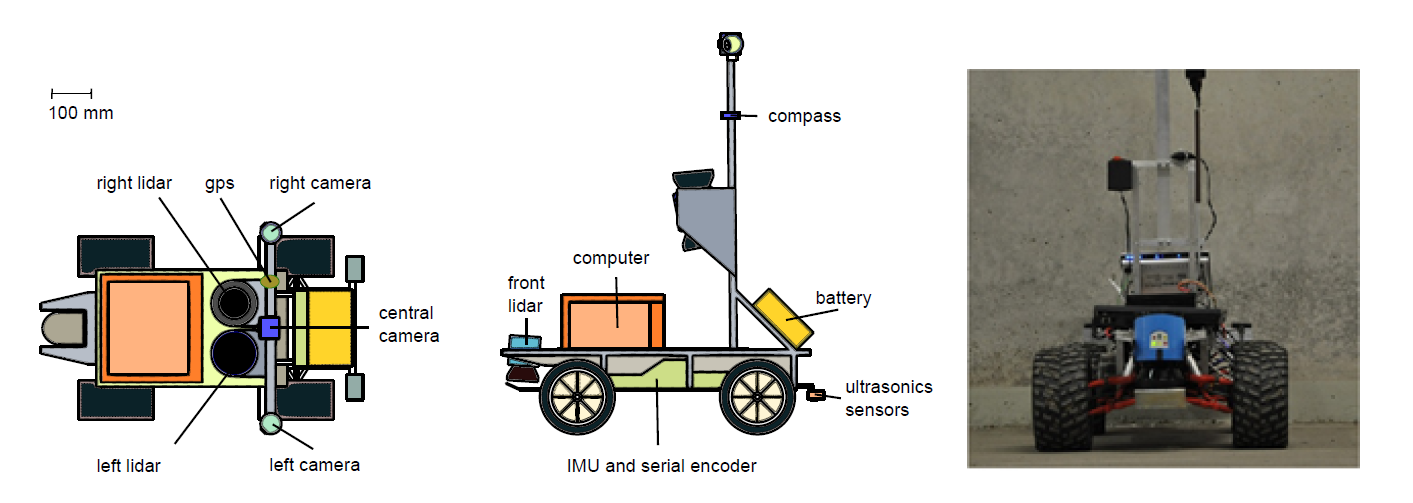
Robot Quido is a nonholomic car-like mobile robot. Quido is based on a remade electric-powered monster truck chassis CEN Racing Matrix5 (750x330x450 mm) with Ackermann steering. The basic chassis was extended by construction frame built of aluminium profiles, which carries most of the sensory systems. The total weight of the car is about 35.4 kg without any load. The robot is equipped with high-precision tri-axis inertial sensor ADIS16355 for continual localization. The head angle is obtained from compass CMPS 03. For global localization, the robot has one GPS receiver GlobalSat BR-355. The robot perceives the surrounding environment using three laser scanners SICK LMS 100/111. The data from them are used in terrain classification process and in collision avoidance system. For the reverse movement, the robot is equipped with two ultrasonic sensors SRF 08. The main control unit consists of a personal computer composed of m-ITX motherboard Asus M4A88T-I Deluxe with six-core AMD processor Phenom II, 4 GB operating memory and 64 GB SSD disk, mounted in plastic frame.
Autonomous control has to be reliable, robustness and has to run in real time. Designed navigation architecture meets requirements by distributed software. Navigation concept is based on parallel concatenated processing, thus the communication between modules in different layers is sorted and buffered. Input data from sensors are transformed to the internal models, plans, and, at the end, to the concrete motion actions. Navigation system does not have any centralized arbiter. All modules are executed at their own space and can run on the different computing platforms and communicate via TCP/IP protocol. There is no internal synchronization mechanism. Instead, all distributed data are globally time stamped. Time information is used for example in integration process from multiple data sources, as well as for watchdogs’ units. Besides TCP/IP, the inter process communication is based on shared memory and signals/slots mechanism. This simplifies configuration and offers high affability in design of these systems. The concept of navigation architecture consists of approximately twenty-five modules which run separately and concurrently in the six layers. Broken system into the layers correspond to the following functions: sensor interface, perception, mapping, road estimation and path planning, reactive layer, and low level control.
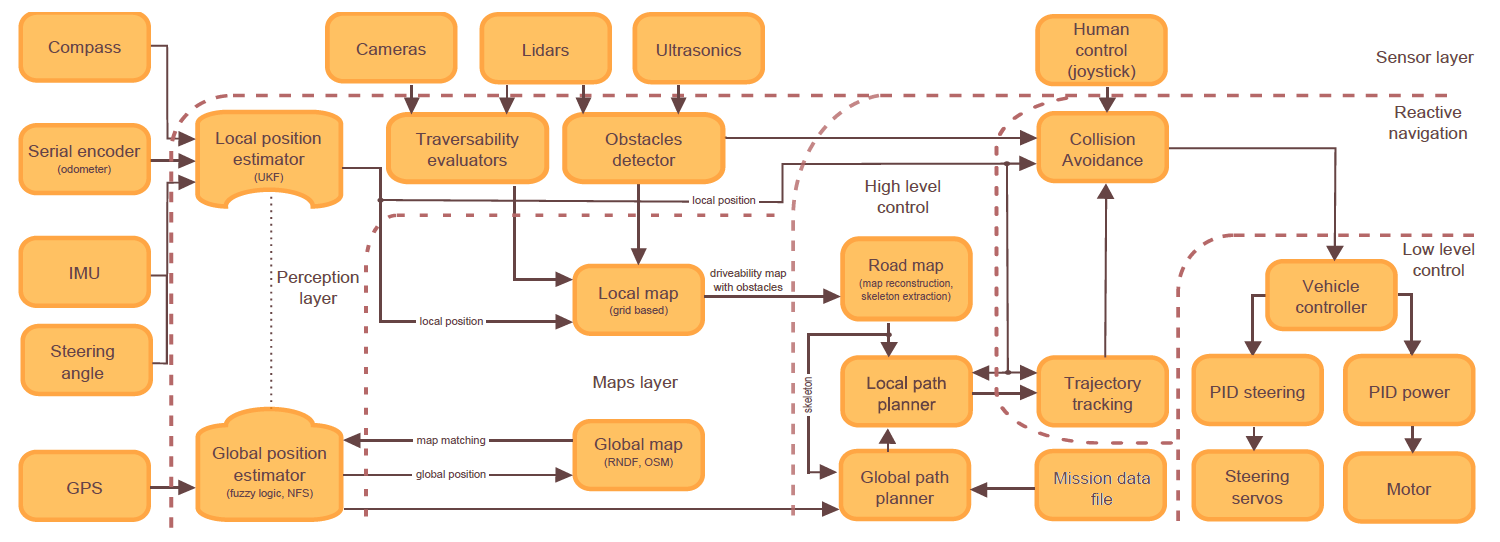
From a broad perspective, the navigation architecture try to deal with inaccuracy of sensoric data by bimodal interiror model for local and global scale. This approach eliminates problematic fusion of data with completely different noise characteristic to acquire one comprehensive model suitable over all navigation scales. Next advantage of this approach is natural decomposition of the complexity according to navigation scope.